concepto de movimientoEl movimiento Representa el cambio de posición de un cuerpo con respecto a un observador físico o un sistema de referencia. Para expresar movimiento es necesario determinar posiciones de un cuerpo en el espacio en función del tiempo.
Un sistema de referencia es un punto o conjunto de puntos respecto al cual describimos el movimiento de uno o varios cuerpos. Un objeto se encuentra en movimiento si su posición con respecto al sistema de referencia varía con el tiempo. Sistemas de referencia
componentes intrínsecas de la aceleraciónLa aceleración cuenta con dos componentes: la aceleración tangencial que representa la variación del módulo, se calcula igual que la aceleración instantánea, y la aceleración normal que expresa la variación de la dirección de la velocidad, esta no se da en movimientos rectilíneos, y se calcula dividiendo la velocidad al cuadrado entre el radio de la curvatura.

El modulo del vector aceleración se calcula realizando la raíz cuadrada de la aceleración tangencial al cuadrado mas la aceleración normal al cuadrado.

Movimiento RECTILÍNEO uniformeUn movimiento rectilíneo uniforme (MRU) es aquel en el que un cuerpo se desplaza con una velocidad contante y por tanto la aceleración es nula. El movimiento rectilíneo uniforme consta de una ecuación del espacio:
Los siguientes ejercicios se ordenan por nivel de dificultad, de los mas sencillos y básicos a los mas complejos y elaborados.
Movimiento RECTILÍNEO uniformemente aceleradoUn movimiento uniformemente acelerada (MRUA) o uniformemente variado (MRUV) es aquel en el que un cuerpo se desplaza a una velocidad que varia, es decir, aumenta o disminuye a un ritmo contante. El movimiento rectilíneo uniformemente variado consta de 3 ecuaciones de las cuales nos valdremos para solucionar los ejercicios.
|
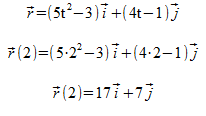
ECUACIÓN vectorial del movimientoLa ecuación vectorial del movimiento describe la posición de un cuerpo en un momento del tiempo determinado. la ecuación se define como:

Para desarrollar la posición de un cuerpo en un momento es suficiente con sustituir el tiempo por el que desees. por ejemplo averiguar la posición de un cuerpo, a los 2 segundos, basado en la siguiente ecuación del movimiento:
Vector desplazamiento
El vector desplazamiento de un cuerpo se calcula restando un vector de posición por otro anterior en el tiempo.

Velocidad media e instantanea
La velocidad media de un movimiento se calcula dividiendo el desplazamiento (o variación de posición) entre la variación del tiempo.

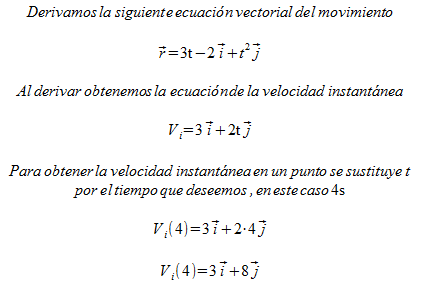
La ecuación de la velocidad instantánea se logra derivando la ecuación del vector desplazamiento, para averiguar la velocidad instantánea en un punto basta con introducir en el tiempo en la ecuación obtenida previamente.
Aceleración media e instantanea
La aceleración media de un movimiento se calcula dividiendo la variación de la velocidad instantánea entre la variación del tiempo.

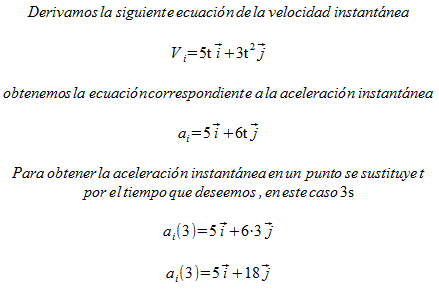
La ecuación de la aceleración instantánea se calcula derivando la ecuación de la velocidad instantánea, Para calcular la aceleración instantánea en un punto basta con introducir el tiempo en la ecuación obtenida previamente.
Composición de movimientos.Para estudiar los movimientos compuestos es necesario, distinguir claramente las propiedades de cada uno de los movimientos de este modo aplicaras las ecuaciones correspondientes en cada uno de ellos. Debes considerar que el tiempo es igual para el movimiento conjunto y los movimientos independientes.
Composición de MRU
|